YZF-LB-MT-RC-5/120
定向多任务雷达
| 西安熠泽丰电子科技有限公司
二零二一年五月 |
目录
2.1. 功能介绍……………………………………………………………………………………………… 3
2.1.1. 收发天线…………………………………………………………………………………….. 3
2.1.2. 射频通道…………………………………………………………………………………….. 4
2.1.3. 信号处理模块………………………………………………………………………………. 4
2.1.4. 天线罩和结构件……………………………………………………………………………. 4
2.2. 多普勒测速原理……………………………………………………………………………………. 4
2.3. FMCW测距原理…………………………………………………………………………………….. 5
2.4. 测角原理……………………………………………………………………………………………… 5
3.2. 雷达状态……………………………………………………………………………………………… 7
3.3. 目标信息显示……………………………………………………………………………………….. 7
3.4. 目标航迹拟合,地图显示……………………………………………………………………….. 8
4.1. 覆盖范围……………………………………………………………………………………………… 9
4.2. 关键设施周边监控……………………………………………………………………………….. 10
4.3. 重点区域监控……………………………………………………………………………………… 11
4.4. 沿线监控……………………………………………………………………………………………. 12
图标索引
图1 YZF-LB-MT-RC-5/120雷达覆盖范围………………………………………………………… 2
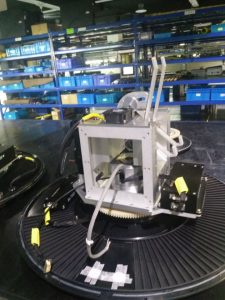
图2 YZF-LB-MT-RC-5/120雷达照片………………………………………………………………. 3
图3 YZF-LB-MT-RC-5/120原理框图………………………………………………………………. 3
图4 多普勒测速原理………………………………………………………………………………….. 5
图5 FMCW测距原理………………………………………………………………………………… 5
图6 测角原理…………………………………………………………………………………………… 6
图7 雷达控制软件…………………………………………………………………………………….. 7
图8 雷达工作参数设置………………………………………………………………………………. 7
图9 雷达工作状态…………………………………………………………………………………….. 8
图10 目标信息显示…………………………………………………………………………………… 8
图11 地图与航迹显示………………………………………………………………………………… 9
图12 稀疏的树木影响雷达作用距离……………………………………………………………… 9
图13 凹坑环境………………………………………………………………………………………… 10
图14 高大物体遮挡背后目标……………………………………………………………………… 10
图15 多径虚警示意图………………………………………………………………………………. 10
图16 三部雷达实现重点设施周边监控…………………………………………………………. 11
图17 重点区域监控布置……………………………………………………………………………. 12
图18 沿线监控布置………………………………………………………………………………….. 12
HEX2T 交易所
YZF-LB-MT-RC-5/120为X波段线性调频连续波体制的多普勒定向多任务雷达。雷达具有高达5Hz的刷新率,120°全视角凝视功能,同时具有高精度的搜索和跟踪能力,最大可搜索128个目标,同时跟踪64个目标,可用于边海防、重点设施、重点区域的无人机、人、车、船等动目标入侵监控。其关键参数如表1所示。
表 1 YZF-LB-MT-RC-5/120雷达关键技术参数
| 名称 | 性能 | |||
| 距离(km) | 目标类型 | 60° | 90° | 120° |
| 无人机(RCS=0.01m2) | 0.90 | 0.75 | 0.67 | |
| 行人(RCS=0.5m2) | 2.4 | 2.0 | 1.8 | |
| 车(RCS=5m2) | 4.2 | 3.5 | 3.2 | |
| 船(RCS=50m2) | 5.5(最大量程5.5km) | |||
| 角度覆盖范围 | 水平±60°,垂直±5° | |||
| 测速范围 | 0.36m/s~45m/s(1.3km/h~162km/h) | |||
| 精度 | 角度精度±0.5°,距离精度±3m,速度±0.1m/s | |||
| 刷新率 | 5Hz | |||
| 供电 | DC24V@1.5A,≤36W | |||
| 通信接口 | 百兆以太网 | |||
| 外形尺寸(mm) | ≤460x270x70 | |||
| 工作温度 | -40~+50℃ | |||
| 重量 | ≤7kg | |||
YZF-LB-MT-RC-5/120雷达覆盖范围如图1所示。
YZF-LB-MT-RC-5/120雷达照片如图2所示。
登录
LIMO 交易所
YZF-LB-MT-RC-5/120为X波段线性调频连续波体制的多普勒定向多任务雷达,收发天线分置,其基本原理框图如图3所示,根据主要功能,雷达可分为信号处理模块、射频通道、收发天线、天线罩和结构件几个部分。
逻辑代币交换
发射天线用来发射雷达波,接收天线用来接收目标反射回来的雷达波。收发天线之间要有足够的隔离度,否则发射信号会直接泄露到接收通道中,容易造成接收通道饱和或雷达灵敏度下降。
什么是加密犹太人
射频通道包含发射信号的本振产生、混频滤波、功率放大、接收信号的低噪声放大、接收混频放大等几个部分。
梳状谱发生器具有非常低的相位噪声,并且几乎没有额外的杂散信号,本振采用梳状谱发生器可能产生非常纯净的雷达发射信号,有利于提高雷达系统对小目标的发现能力。
混频滤波主要功能是将信号处理模块输入的基带信号上变频到X波段,满足天线发射所需的频率。
功率放大器是将信号放大到足够的强度,雷达探测距离与该模块密切相关。
低噪声模块是接收通道的第一个模块,采用低噪声放大目的是尽量降低雷达系统的本身的电子噪声,提高雷达的灵敏度。
接收混频放大模块是将接收信号和发射信号直接混频,从而得到频率很低的差拍信号,供信号处理分析。
筹集者登录
信号处理模块是雷达的核心,又可分为通信模块、FPGA、DAC和ADC几个部分。通信模块用来与上位机的雷达软件进行通信,接收上位机的控制命令和配置参数;向上位机发送雷达状态信息和探测到的目标信息;FPGA为信号处理的运算和控制平台,目标检测算法由FPGA完成;DAC用来产生发射基带信号;ADC用来采集射频通道混频输出的差拍信号。
将会爆炸的新加密货币
天线罩和结构件是用来保护雷达天线及电路模块免保护天线系统免受风雨、冰雪、沙尘和太阳辐射等的影响,使天线系统工作性能比较稳定可靠,同时减轻天线系统的磨损、腐蚀和老化,延长使用寿命。
米罗龙
当雷达发射一定频率的雷达波对目标扫描时,如遇到运动目标,回波的频率与发射波的频率出现频率差,称为多普勒频率。根据多普勒频率的大小,可测出目标对雷达的径向相对运动速度。
用频率过滤方法检测目标的多普勒频率谱线,滤除干扰杂波的谱线,可使雷达从强杂波中分辨出目标信号。所以多普勒雷达比普通雷达的抗杂波干扰能力强,能探测出隐蔽在背景中的活动目标。其基本原理如图4所示。
卡鲁拉币应用程序
FMCW雷达在扫频周期内发射频率随时间变化的扫频信号,该信号被目标反射后的回波与发射信号之间有一定时间延迟,从而经过混频滤波后输出一个与该延时有关的差频信号,通过测量该频率可以获得目标与雷达之间的距离信息,差频信号频率较低,因此硬件处理相对简单、适合数据采集并进行数字信号处理,其基本原理如图5所示。
NFUP交换
为了进一步提高雷达的定位能力和叫角分辨率,在雷达主要波束范围内可利用多个接收天线之间的相位关系计算目标所在的方位角。其基本原理如图6所示。
柴易代币应用程序
上位机雷达处理软件是雷达系统不可或缺的一部分,主要完成雷达控制、工作参数的配置和调整、接收和显示雷达的状态信息、接收并显示目标信息、完成点迹凝聚、航迹处理、地图显示等功能。
雷达处理软件主界面如图7所示。
银行交易所
上位机雷达处理软件可用来启动或停止雷达,可设置雷达扫描角度范围和检测距离范围,可设置工作频率和波形参数,如图8所示。
竹子交换
在软件界面实时显示当前雷达的工作状态,如图9所示。
FNCT交换
雷达软件可以显示雷达监测到的目标点迹,并显示目标信息。包含距离、方位角、速度、以及信噪比等值,具体如图10所示。
SHIKA EXCHANGE
根据目标点迹的信息,进行凝聚,然后拟合出目标的运动轨迹,并在地图上实时显示出来,如图11所示。
智能画廊交换
面食金融应用程序
雷达正常可覆盖范方位120°、俯仰10°范围内的运动目标,最大作用距离5.5km,最大可覆盖面积31.68平方公里。推荐安装高度不低于5m,安装时尽量保持雷达左右水平,天线面竖直。以下情况可能会影响雷达探测的效果:
- 稀疏的树木会影响雷达的作用距离,如图12所示;
- 可能会丢失凹坑内的目标,如图13所示;
- 丘陵、山坡、铁丝网或高大建筑物背后可能会被遮挡,如图14所示;
- 巨大平面(围墙、近处围挡或者大型建筑)的多径反射可能造成虚警(目标镜像位置),如图15所示。
聚集交流
采用三部雷达,可监控最大半径为5.5km范围内的运动目标。通常用于重点设施的周边监控。其示布置意图如图16所示。
佩佩道交换
采用多部雷达,组成防御圈,可监控更大范围内的目标。常用于营区、水库、重点区域的入侵监控。其示布置意图如图17所示。
标记交换
采用多部雷达,首尾相连,可以形成平均宽度超过1km的电子围栏。常用于边境线、天路沿线、输油管道、运河沿线的入侵监控。其示布置意图如图13所示。